Je profite d’être (enfin) en congé pour vous présenter le petit dernier, et aussi parce-que DamSp avait l’air très intéressé !
Il s’agit donc d’un quad racer, plus communément appelé « drone », que j’ai monté moi-même. Alors déjà comment choisir ses composant correctement ? Je vais vous donner la procédure que j’ai suivie. Dans un premier temps il faut savoir quelle taille de frame on veut, pour ma part je suis parti sur un frame entre 210 et 250 mm pour pouvoir y monter des hélices en 5" et avoir une taille raisonnable pour faire du freestyle. Après avoir longuement hésité je suis parti sur QAV-R de chez Lumenier en 5" soit une diagonale de 220 mm. Le gros avantage que j’y ai vu était l’indépendance des bras par rapport à la plaque centrale tandis qu’un QAV210 est en une seule pièce, donc si ça casse, c’est plus simple à remplacer !
Une fois la frame choisie, j’ai cherché quelle type de batterie irait bien dessus, 3S ? 4S ? Sans hésité je suis parti sur du 4S, la plupart des moteurs supportent ces tensions et la patate y est !! Ensuite vient la motorisation, dans mon cas je cherchais des moteurs ayant un kv suffisamment important pour avoir de la vitesse mais pas trop pour avoir du couple et des accélérations puissantes ! (Mais attention aux hélices déjà fragilisés, exemple en fin de 2ème vidéo ) Je suis donc parti sur des Cobra 2204 (22mm de diamètre et 4mm de hauteur de bobinage) en 2300kv (valeur la plus répandue dans le domaine). Pour vous donner un exemple, si j’étais parti sur une frame 4" avec les mêmes moteurs, j’aurais choisi des 2600kv qui compenseront la plus faible portance des hélices, si c’était une frame 6", j’aurais choisi des 1960kv qui pourront plus efficacement entrainer des hélices de cette taille. A savoir que plus le kv est élevé plus le quad sera nerveux et donc plus sensible aux coups de gaz ou mouvement divers.
Après les moteurs viennent les esc, donc on vérifie combien on risque de consommer et on sélectionne en conséquence. Je rappelle qu’il faut un esc par moteur, ne mettez pas les 4 moteurs sur un seul esc, vous risquez d’être surpris ! J’ai donc choisi des esc LittleBee 20A qui ont une très bonne réputation et un rapport qualité/prix très sympa ! Ils ont aussi l’avantage de supporté le « OneShot » qui est un firmware permettant un traitement plus rapide si je ne dis pas de bêtise (à vérifier !)
Enfin le contrôleur de vol (FlyBoard, FC, etc…), choix à ne pas prendre à la légère puisque c’est le cœur du système… Il en existe beaucoup et pour tous les prix, pour débuter un CC3D suffit pour apprendre à faire les réglages, si on veut aller un peu plus au fond des choses, un Naze32 est parfait, on arrive vite à comprendre comment ça se paramètre. Pour les confirmés il y a des cartes un peu plus chères comme la Lux mais je ne saurais pas vous en dire plus, je ne m’y risquerais pas, ma Naze32 me suffit largement et ça tourne très bien !
Mais il manque 2-3 trucs maintenant… Je voulais voler en immersion moi ! J’y viens ! Il y a déjà un truc qu’il faut savoir sur les émissions de signaux analogiques (que ce soit vidéo ou n’importe quoi d’autre), les réglementations françaises n’autorisent pas d’avoir un émetteur d’une puissance supérieur à 25mw sans licence adéquate, ça suffit pour s’amuser si on ne s’éloigne pas trop mais attention en passant derrière les arbres… Certaines fréquences de la bande des 5.8GHz comme la 5658 (que j’utilise…) sont interdites puisqu’elles sont utilisées par l’armée, alors évitez de jouer près d’une base militaire ! Mon émetteur est un FatShark FX795T-2 qui a l’avantage d’être un 25mw par défaut, et un 200mw une fois que l’on a coupé le petit pont sur le côté ! Je suis vite passé à 200mw car je vol loin des habitations et on a une bien meilleure image si un obstacle se retrouve entre le quad et le pilote. Autrement dit je ne suis pas en règle… (Mais chut, c’est un secret…)
Pour terminer, qui dit FPV, dit caméra ! La mienne est une 650TVL de Lumenier, donc qui une résolution tout à fait convenable, on distingue bien les obstacle, les couleurs sont pas mal du tout et la caméra gère bien la faible luminosité, de nuit elle passe en nuance de gris avec un capteur infrarouge (c’est ce que j’en ai déduit en tout cas ). Je ne saurais pas trop vous en dire plus sur les cam si ce n’est qu’il vaut mieux privilégier une résolution moyenne avec une faible latence qu’une haute résolution mais avec une forte latence, c’est important d’avoir un bon contrôle de l’engin en temps réel !
Je vous passe tout ce qui est radio/récepteur, ça dépend plus du budget et des ambitions de chacun, idem pour les lunettes vidéo (format, résolution, confort…). Juste pour info, j’ai une Taranis X9D plus avec un récepteur D4RII utilisé en PPM (un seul bus câble par lequel transitent les commandes) et des lunettes FatShark Dominator V2 en 16/9 et une bonne résolution (meilleure que ce qu’une caméra fournit en général…).
Voilà j’ai beaucoup blablater mais j’aime bien expliqué ce genre de chose, peut-être que ça en intéressera certains ! Place aux photos et vidéos maintenant !
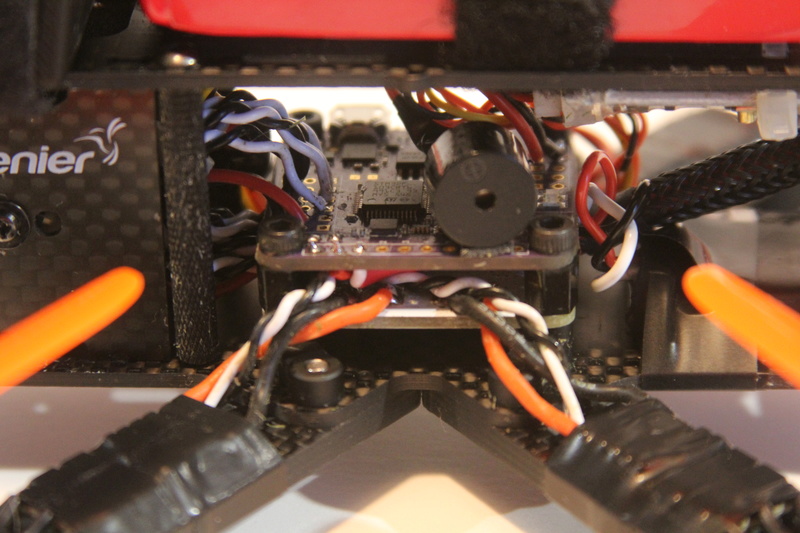
Comme vous les remarquez peut-être il n'y a pas trop de place alors il faut faire au mieux pour tout caser, j'ai essayé de m'appliquer à faire les câbles le plus court possible (léger gain de poids et de place) et il faut tout serrer pour espérer tout rentrer parce-qu'on peut encore rajouter des gadgets comme un OSD qui permettra d'avoir des informations directement sur le retour vidéo!
J'espère que la présentation vous aura plu! A bientôt! Maniaxx.
Je suis vite passé à 200mw car je vol loin des habitations et on a une bien meilleure image si un obstacle se retrouve entre le quad et le pilote. Autrement dit je ne suis pas en règle… (Mais chut, c’est un secret…)
Trop tard le monde entier est au courant
J'ai remarqué les contros joyeusement enrobés au scotch Ils ne surchauffent pas un peu ?
Les vidéos sont chouettes mais je ne sais pas ce qu'il y a je suis barbouillé d'un coup Non je rigole, c'est visible
Il s'est passé quoi pour le crash
A++
_________________ Si ça casse, je renforce... Mon p'tit MT: Savage Flux 2200 plutôt stock mais bien bidouillé
Pour les contros Kat non, pas de surchauffent, à la base ils sont enroulés de gaine thermo que j'ai du retiré pour y souder directement les moteurs, c'est plus propre comme ça! du coup les esc respirent limite mieux.
On dirait ma môman, elle aime pas non plus, tu verrais dans les lunettes ça serait peut-être pire
Pour ce qui est du crash c'est une histoire malheureuse, une (deux?) hélice à l'arrière a lâché causant la perte de contrôle totale, du coup, coupure des moteurs ça ne servait à rien d'insister... Résultat, l'écran de la gopro explosé...
Damien, en effet il a une bonne réputation, il se veut le plus simple possible de réparation pour gagner du temps en compétition, bon ce n'est pas trop ce que je vise mais bon, faut le savoir.
Je ne connaissais pas cette appli, je vais tester je pense, ça peut donner des idées
Avec certains OSD tu peux avoir un horizon artificiel à l'écran mais d'un point de vue personnel je trouve que ça prend beaucoup de place sur l'image pour pas grand chose, on a pas tellement le temps d'y faire attention en fait
Merci du compliment, mais j'aimerais encore progressé, il y a des monstres du FPV qui me font rêver avec des tricks tous plus fous que les autres!
La Naze32 gère tout, sans elle ça vole pas Elle gère au moins 3 modes de vol: un mode stabilisé, un mode intermédiaire que j'ai jamais trop utilisé, et enfin le mode accro qui laisse libre les mouvements du quad, donc pas de retour "à plat" La Naze32 va envoyer les bonnes commandes aux esc en fonction du mode paramétré ainsi que des réglages PIDs, mais là c'est vachement technique, faudrait des heures pour expliquer convenablement et des tutos le font déjà bien
Très belle palette de couleurs du paysage , bon rythme de vol, ni trop mou ni trop secoué et musique sympa
Histoire de faire mon casse-pieds je dirais que c'est dommage que la vidéo soit aussi comprimée, ça dégrade la résolution et floute une partie des détails. Mais je suppose que c'était la contrepartie pour avoir une bonne fluidité
A++
_________________ Si ça casse, je renforce... Mon p'tit MT: Savage Flux 2200 plutôt stock mais bien bidouillé
Pour ce qui est du coin c'est dans le nord, entre Calais et Dunkerque ou j'y ai passé une bonne partie de mes vacances.
J'essaierais de faire un test de vitesse un de ces quatre, histoire d'avoir une idée quand même.
Comme tu dis Kat, la qualité n'est pas au rendez-vous hélas, j'ai galéré à trouver un format de rendu propre en 60fps mais impossible, peut-être que j'ai loupé un truc... On est autour des 20minutes de rendu donc j'en ai pas essayé des tonnes non plus, pas le temps pour ça! D'autant plus que youtube réduit davantage la qualité avec son traitement.
Ben tu sais c'est souvent ça avec les caméras. Pour avoir du FPS sans réduire la résolution on augmente la compression donc on dégrade l'image
Mais peut être qu'avec une carte mémoire plus rapide (Vitesse d'écriture) tu pourrais avoir un meilleur résultat Certaines caméras ajustent leur taux de compression en fonction des performances de la carte justement
A++
_________________ Si ça casse, je renforce... Mon p'tit MT: Savage Flux 2200 plutôt stock mais bien bidouillé
Le problème ne vient pas de là justement, ma SD monte à 95MB/s en écriture, on trouve difficilement mieux. En brute la qualité est bien meilleure qu'au final, c'est vraiment après découpage de la vidéo et rendu Sony Vegas que la qualité se perd, je testerais en 30fps voir si ça arrange la chose.
Vous savez quoi J'ai fais une vidéo J'ai fais une vidéo
Elle est courte, je ne me suis absolument pas donné de mal pour la monter, mais elle est là, pour vous, alors j'espère qu'elle vous plaira!
A dans 10 ans pour la prochaine Maniaxx
PS : Pour ceux qui ont l’œil, sur la miniature on aperçoit des pièces en plastique bleu, c'est de l'impression 3D. J'en ferrais peut-être un sujet si il y a du monde intéressé mais je ne suis pas sur que ce soit très exploitable pour les joujous à roulettes.





















 Sujet: Quad Racer FPV : Lumenier QAV-R 5"
Sujet: Quad Racer FPV : Lumenier QAV-R 5" 

























 ouai ch' sais pas ....
ouai ch' sais pas .... 
 le son est nickel et quelle maitrise dans le vol.
le son est nickel et quelle maitrise dans le vol.
 , bon rythme de vol, ni trop mou ni trop secoué
, bon rythme de vol, ni trop mou ni trop secoué 









 J'ai fais une vidéo
J'ai fais une vidéo 

 Tu vole en immersion ?
Tu vole en immersion ?
